
2022/12/05
『スマートアグリの自動化・ロボット化技術について』
Smart agriculture automation and robotization technology
農林水産省が掲げるスマートアグリ(スマート農業)の定義は、「ロボット技術やICTを活用して省力化・精密化・高品質生産を実現する新たな農業」とされている。 具体的には、ロボットトラクタの活用や、スマートフォンなどのアプリを利用して水田の水量を管理するなど、ICT先端技術による作業の自動化・簡素化のことを指している。
1.自動化の現状とニーズ
農業機械は、大自然のもとで変化に富んだ土壌や作物を対象に、広大な圃場で営まれている。そのような農業の特質に対応して、走破性に優れた移動機能、変化への柔軟な適応性、1人でより広い面積を処理する作業能率などを併せ持つように進歩してきている。反面作業者は、場所ごとに作物や土壌の条件に合わせて作業機械の調整を行う。素早く作物列の目標経路に合わせて機械を操縦するなど作業者への負担がかかっていた。少しでもその負担を軽減するための解決策として、作物列に沿った運転操作や作業機械の調整などの自動化の要求が増してきている。
2.ロボット化のニーズ
国内の農業は、長年にわたり主食である米や麦などの作物を中心に機械化が進められてきた。例えば水稲10aあたりの平均労働時間は、1945年は約250時間を要していたが、1997年には37時間にまで減少した報告が当時されていた。しかし、規模拡大や国際的価格競争力強化などのニーズに応える必要が出てきた。そのため飛躍的な省力化、過重労働の軽労働化が求められるようになった一方で、野菜、果物等々では、一斉作業よりも収穫作業など熟度や大きさ、形状などを判別しながら行う選択的な作業を要するケースが多くなり、従来の機械技術では機械化が難しかった作業が多い状況であった。
このような背景から、メカトロ技術やIT技術を駆使して人が担っていた認識、判断にかかわる選別、検品や検査といった部分を含めた機械化、ロボット化技術を導入した機械化、知能化が現在指向されている。
ロボット化の目的には、次のようなことがあげられる。
(1) 車両の運転操作の自動化、無人化
(2) 人の動きに近い柔軟な動作による機械化、未導入作業の機械化
(3) さらに労働環境改善と作業の安全性、快適性向上
などである。
3.ロボット化の要素と条件
農業用ロボットの構成要素は、一般のロボットと同様であるが、産業用ロボットの技術成果をそのまま農業に移転することは、農業固有の制約条件・課題等により容易ではない。 表1. に製造業と農業における制約条件・課題の比較を示す。
表1. 製造業と農業における制約条件・課題の比較
| 制約条件・課題 | 製造業 | 農業 | |
|---|---|---|---|
| 対象の均一性 規格化の可能性 |
ほぼ均一 可能 |
不均一 困難 |
|
| 対象のデリケートさ | デリケートなものでも補強 可能 |
デリケートで補強 不可能 |
|
| 移動機能の必要性 | 概ね不要 | 概ね必要 | |
| 走行路面 | 平坦、舗装 | 傾斜地、不整地 | |
| 支援設備 | あり | 概ねなし | |
| 環境制御 | 可能 | 困難 | |
| 年間稼働時間 | 長い | 短い | |
| 専任オペレータの配置 | 可能 | 困難 | |
| 投資・資本 | 中~大 | 小 | |
| 立入禁止区域の設定による 安全確保 |
可能 | 困難 | |
農業固有の制約条件・課題は、次のような5つがあげられる。
(1) 作物は、成長速度を人為的に制御することが困難であり、生産量を計画通りに制御することが難しい。このため、農産物の供給は需要に対して機敏に対応することができないため、価格に安定性を欠く要因となっていて、農業への計画的な投資が難しい。
(2) 作物および農産物は生鮮物であり、色、形状、大きさ等が不揃いで、工業製品のような規格化は困難であり、また作物は一般に田畑に根ざしているので、農業機械への要求としてロボットには移動機構が備わっていることが必須となる。
(3) 農業は、作物の成長過程に応じて数日ずつ異なる作業が必要となる。そのため、作業ごとに使用される機械の稼働日数は少ないので、新たな投資を要するロボットには稼働率向上のため汎用性が求められる。
(4) 作業環境は、屋内と比較して劣悪であり、商用電源や照明などの付帯設備はないのが普通である。路面は、ぬかるみや急傾斜地も多く、安定した路面はほとんどない。
(5) 多くが個人経営であるため、個々の作業に特化した熟練者は容易に育成できず、そのためロボットは取扱いの容易なものでなければならない。
4.農業用ロボットの事例
先に説明した条件を考慮した上で、次の4つのロボット技術の研究・開発が進んでいる。
(1) ロボットトラクタ
圃場作業ではトラクタが各種作業に汎用的に使用されるが、作業そのものは比較的単調で、無人作業による省力化、作業精度向上と労働負担の飛躍的軽減が望まれている。その中で、車両系ロボットの成否は、圃場内における車両位置および進行方向を検出する航法センサと、最適な作業経路を自動生成し、ロボットを制御する作業支援ソフトに大きく依存している状況にある。耕運機ロボットでは、航法センサとして、次の3つの方式があげられる。
① 圃場の周囲にケーブルを敷設して誘導磁界を発生させ、磁界変化によって自己位置を
検出する電磁誘導方式
② 慣性航法により精度を向上させたGPS方式
③ 自動追尾測量装置による光学計測方式
があり、圃場の条件に合わせて選択することが可能である。

図1. ロボットトラクタ(出典:井関農機株式会社1.)
現在、上市されている代表的なトラクタ(図1.)の多くは、既存トラクタをベースにした車両に操縦機能、走行機能、作業制御機能を自動制御できるようにアクチュエータを組込み、作業制御機能を支援する位置センサを装備している。作業支援ソフトは、タスクプランをマニュアル操作で教示して運転情報を取得した上で、圃場区画データと組合わせて最適な作業経路を生成することで、車両制御を行い経路に沿って作業を実施するようロボットの各部アクチュエータを制御する。耕運機ロボットは、圃場の各種作業に広く対応可能になってきている。さらに異常対応として、例えばスリップや区画外飛び出し等が検出された場合、作業を一旦中断して状況を把握、異常原因をロボットが排除して自動復帰するか、もしくはオペレータが異常原因を排除した上で作業を継続できる対応機能を備えるなど自動化が進んでいる。
これらの技術は、ロボットトラクタなどに応用展開され、簡単な初期設定を行うだけで、作業そのものはロボットに任せられるように技術が確立されている。作業速度は、0.2~1.2 m/sに対応し、作業能率は慣行作業とほぼ同等であるが、直進性や位置決めなど作業精度は、ベテランオペレータと同等かそれ以上の能力を有している。
ロボットトラクタは、大規模圃場の多い海外ですでに導入が始まっている。国内では年間稼働率やコストに課題を残しているが、田植え機などの一定作業経路(直進経路の往復)に完全自動運転を行う自律直進装置(ロボット化=知能化)など実用化の段階にある。
(2)ミニトマト収穫ロボット
このロボットは、主にハウス内で栽培されるミニトマトの自動収穫を目指したものである。三次元視覚センサは、エンドエフェクタ(ロボットハンド)と本体などに備えられた(図2.)のような収穫ロボットがある。
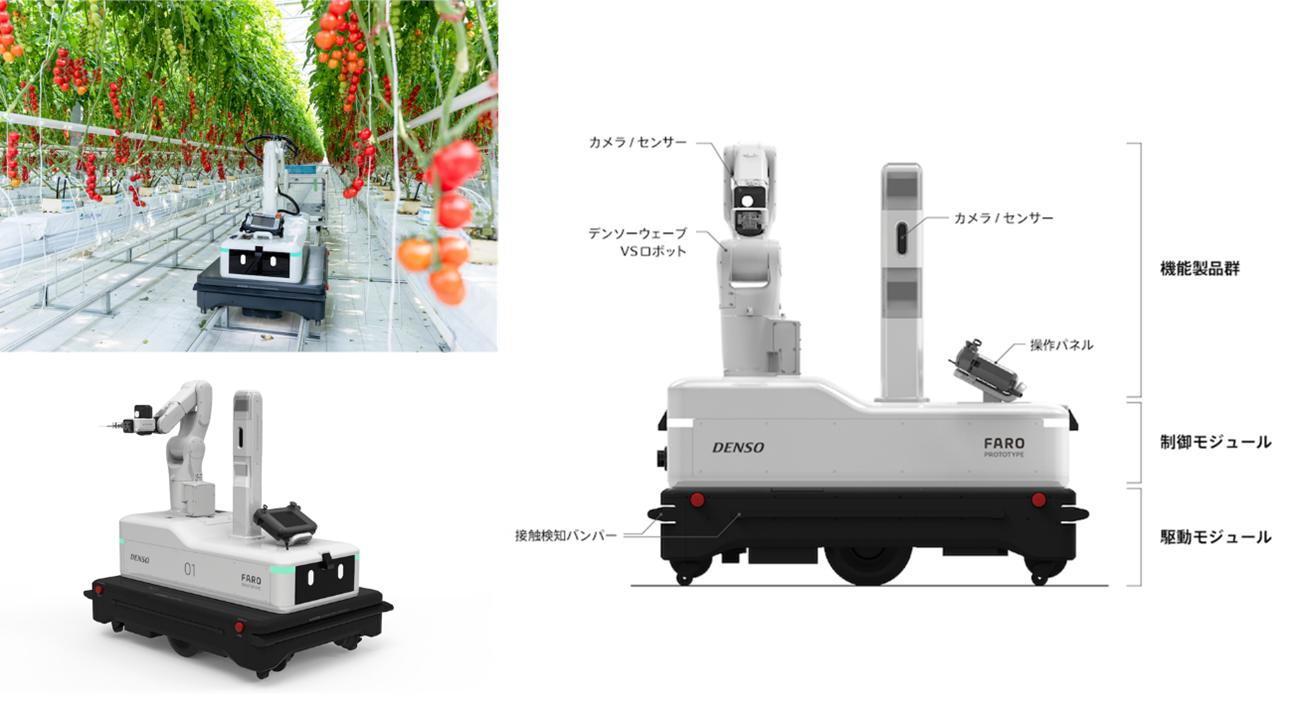
図2. ミニトマト収穫ロボット(出典:(株)デンソー2.)
波長1(685nm)と2(830nm)のレーザ光を上下左右にスキャンし、その反射光をPSD(Position Sensitive
Detector)素子で受光して三次元画像を得る。さらに波長2によって測距を行い、波長1と2の反射光量の比から赤く熟した果実の認識を行う。また、ロボットに備えたエンドエフェクタの左右振り機構によって、正面からだけでなく側方からも果実の認識が可能で、房状に重なり合ったミニトマトを確実に認識できるように工夫されている。エンドエフェクタも各種あるが、房から切り取るフィンガータイプや果実を吸引するゴムパットタイプとロボットアームの動きと連動してもぎ取るものなどがある。本体については、自律自動搬送車(AGVやAMRなど)や走行用レール上を移動する電動台車方式などがある。
現状のロボットの能力としては、収穫適期にある果実は、測距誤差5mm以下で茎葉に隠れた果実を含め約90%が認識可能であり、1つの果実を収穫するのに要する時間は4~6秒程度である。
ミニトマト以外の活用事例では、オレンジ、柑橘、キャベツ、ぶどうなどの収穫ロボットが多く開発されているが、慣行作業と比べて作業効率が劣る点が課題であり、協働での活用などを含めた今後の技術開発・改善が待たれる状況である。
(3)野菜接木ロボット
野菜接木ロボットは、連作による土壌伝染病害の回避や強健性の付与などを目的にキュウリ等の野菜苗木の接木が行われるが、作業は繊細で熟練を要し、機械化=ロボット化が望まれていた。ロボットは、穂木や台木を供給、把持して適切な位置で切断する苗供給、切断部、台木と穂木の切断箇所を正確に位置あわせしてクリップをかける接合部、接合した接木苗を排出する接木苗取出し部から構成されている。
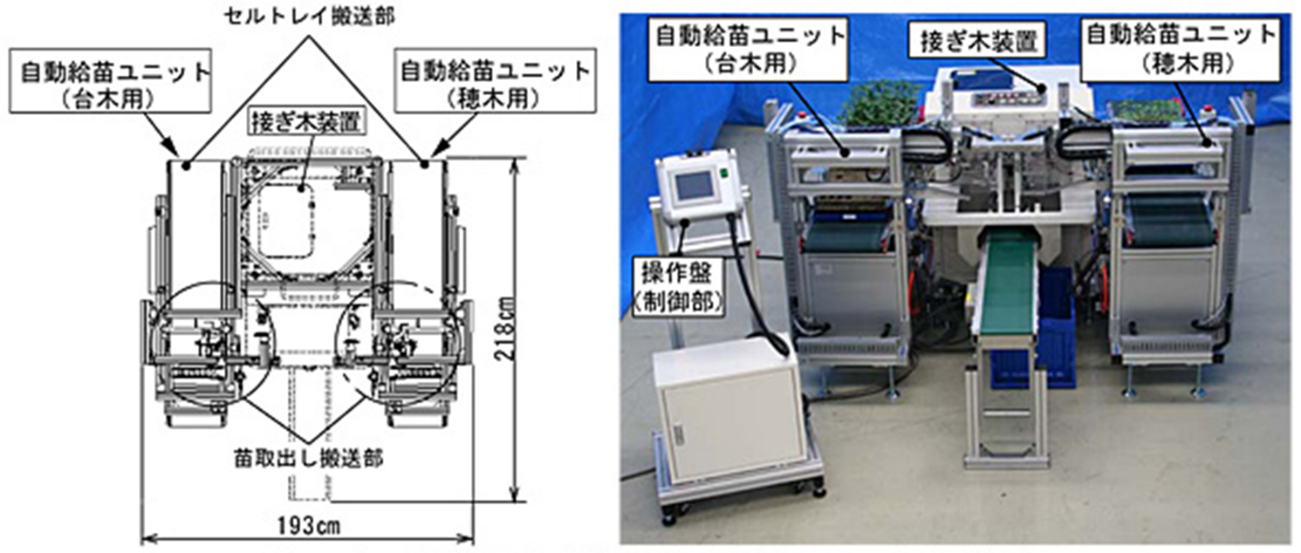
図3. ウリ科野菜用前自動接木装置(左:平面図、右:前景)出典:農研機構3.
図3. に示したロボットは、穂木および台木をそれぞれの供給ユニットに人手でセットし、自動で穂木および台木を供給⇒切断⇒接合⇒クリップがけを空気圧アクチュエータで全自動化している。処理速度は、毎時800株程度で熟練作業者をはるかに超えた能力を有するものが普及している。
(4)搾乳ロボット
搾乳作業は、365日休むことなく毎日、朝夕数時間を要する作業で、搾乳作業のロボット化のニーズは非常に高いものがあった。搾乳ロボットに要求される機能は、乳牛が自ら搾乳を行う場所へ移動してくるフリーストール方式である。この方式の主な機能は、次の8つがあげられる。
① ストール内への牛体の誘導と個体の識別
② 牛体の補足
③ 乳頭洗浄、前絞り
④ 乳頭位置検出、ティーカップ(ミルカーの乳吸引部分)装着
⑤ 分房別搾乳制御
⑥ ティーカップ離脱
⑦ ディッピング(搾乳後の乳等殺菌)
⑧ 搾乳データの記録、管理
などである。
特に自動化を考えた場合、課題となるのが ③ 乳頭洗浄、前絞り、④ 乳頭位置検出、ティーカップ装着で、ここで対象となるのが乳牛で静止していないことや、乳頭位置、形状など個体差によりかなり高度なロボット化=知能化がロボットには求められる(図4.)。

図4. 自動搾乳機「ボランタリミルキングシステム」(出典:(株)北海道クボタ 4.)
ハード的には、乳牛の受傷を防ぐ必要があり、使用するアクチュエータなどの機器類の設計においても安全性を考慮しなければならない。1頭1回の搾乳に要する時間は、約10分であり、適切な時間感覚で1日数回の搾乳に乳牛自らがストールに訪れるように訓練した場合、搾乳ロボット1台あたり60頭程度の処理が可能となる。
以上
【参考文献・引用先】
- 井関農機株式会社H.P ロボットトラクタ
https://products.iseki.co.jp/tractor/trac-robot/ - 株式会社デンソーH.P ミニトマト収穫ロボット
https://www.g-mark.org/award/describe/50461?token=43fgAU36eu -
農研機構H.P ウリ科野菜用前自動接木装置
https://www.naro.go.jp/project/results/laboratory/brain/2008/brain08-03.html -
株式会社北海道クボタH.P 自動搾乳機「ボランタリミルキングシステム」
https://www.hokkaido-kubota.co.jp/products_list/2014/09/post-14.html - 機械光学便覧 応用システム編γ1「産業機械・装置」日本機械学会編(2005年初版)